Ubiquity Robotics ROS image
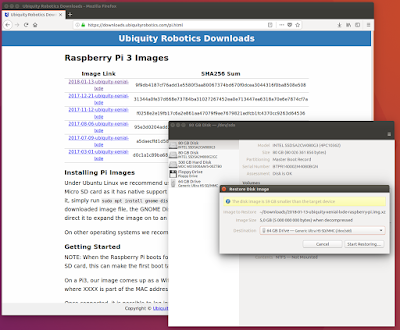
Raspberry PI 3 image with ROS installed (but with a catch). https://downloads.ubiquityrobotics.com/ Image is very easy to flash. apt-get install gnome-disk-utility This is precustomized for Ubiquity Robotics Magni robot. https://ubiquityrobotics.com/magni.html Github related: https://github.com/UbiquityRobotics/ubiquity_main How to disable the default magni default ROS setup starting: https://askubuntu.com/questions/19320/how-to-enable-or-disable-services Type: systemctl disable magni-base Not fully stable due to memory issues? https://answers.ros.org/question/249515/raspberry-pi-crashes-when-i-try-to-build-the-catkin-workspace/ Workaround .. no parallel compiling catkin_make -j 1 How to disable user interface and enable ssh (if not needed, GUI takes quite much memory): http://ask.xmodulo.com/disable-desktop-gui-raspberry-pi.html raspi-config Bluetooth had issues on this setup. Raspbian worked, used similar settings and got BT working. Commented f...